The DARPA Grand Challenge
The DARPA Grand Challenge contest awards $2,000,000 to the autonomous vehicle which can most quickly traverse an approximately 150-mile course though the desert southwest. The contest is in it's second year -- last year, the best robot got only seven miles into the course -- but maybe this year we'll get a winner.
DARPA got something like 195 entrants this year, and winnowed that down to 43 teams which were invited to a qualifying round at the California Speedway in Fontana, CA. Out of the 43, they'll invite 20 teams to go to Primm, Nevada to attempt to run the actual course, based on their performance in the qualifying round.

I'm not at all far from the California Speedway (I've autocrossed there a few times), and I figured that this should be geek entertainment of the highest order. I was definitely not disappointed.
These robots are amazing. They are programmed with a set of GPS waypoints, then sent out on their own, with no outside input at all. They can only depend on their on-board sensors and computational resources.
 Just because they have the waypoints, doesn't mean they can blindly follow them. The qualifying course had all sorts of obstacles placed precisely at the programmed waypoints -- vehicles are expected to notice, identify, and avoid the obstacles. Some of the obstacles were small tank traps -- some were cars. Judging by the condition of the cars, not all of the robots successfully avoided them.
Just because they have the waypoints, doesn't mean they can blindly follow them. The qualifying course had all sorts of obstacles placed precisely at the programmed waypoints -- vehicles are expected to notice, identify, and avoid the obstacles. Some of the obstacles were small tank traps -- some were cars. Judging by the condition of the cars, not all of the robots successfully avoided them.
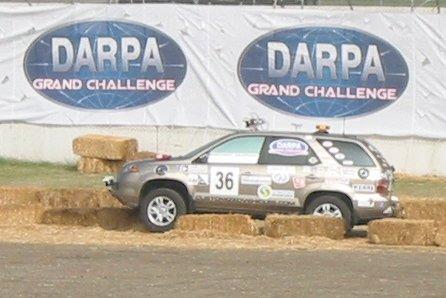
 This challenge is a great idea -- all sorts of teams showed up, with all sorts of vehicles. Blue Team (UC Berkeley students) fielded an autonomous motorcycle, and OshKosh/OSU fielded a gigantic truck. In between, there was a quad, a few custom vehicles, and a bunch of pickups and SUVs.
This challenge is a great idea -- all sorts of teams showed up, with all sorts of vehicles. Blue Team (UC Berkeley students) fielded an autonomous motorcycle, and OshKosh/OSU fielded a gigantic truck. In between, there was a quad, a few custom vehicles, and a bunch of pickups and SUVs.
 Team Bonzai fielded a Volkswagon Touareg that looked completely stock, save for a GPS antenna mounted to the roof, while the University of Indiana sent out a jeep whose front end was totally obscured by sensors. Red Team, from Carnegie-Mellon, sent out two Humvees, each with a gigantic, eye-like sensor mounted on top.
Team Bonzai fielded a Volkswagon Touareg that looked completely stock, save for a GPS antenna mounted to the roof, while the University of Indiana sent out a jeep whose front end was totally obscured by sensors. Red Team, from Carnegie-Mellon, sent out two Humvees, each with a gigantic, eye-like sensor mounted on top.
Strangely enough, despite a wide variety of approaches, almost all of the robots performed similarly. I watched robot after robot negotiate a difficult, obstacle-strewn course successfully. The Red Team and Stanford robots were particularly fast, but all sorts of robots managed to complete the course.
This is a significant improvement over last year, when it apparently took several days of trials before even one robot completed the course successfully. This time, a robot finished the course the first day.
And these guys weren't messing around -- these robots were moving out. DARPA had imposed various speed limits on sections of the course, presumably for safety, so that the 2-1/2 mile course could not be completed in less than 10 minutes. Several teams came in right at the optimal time, which would require some quick driving.
Think about how hard it would be for a robot to scan a hundred feet ahead, identify obstacles from the size of cones to the size of minivans, differentiate between pavement and grass, hay bales and cement barriers, make a plan to avoid the obstacles while keeping as close as possible to the preprogrammed waypoints, then direct the vehicle. At 30 mph, you're covering something like 40 feet a second, and most scanners don't look farther than 150 feet ahead. That's some quick computing!
I'm blown away at how good some of the robots are, but more than that, I'm blown away that so many different robots, with so many different configurations, manage to successfully traverse this qualifying course.
I don't think I'll be able to make it out to Primm, Nevada, for the actual contest, but I wonder if there won't be a winner this year. I sure hope so. This is almost as exciting as the Ansari X Prize last year!
DARPA got something like 195 entrants this year, and winnowed that down to 43 teams which were invited to a qualifying round at the California Speedway in Fontana, CA. Out of the 43, they'll invite 20 teams to go to Primm, Nevada to attempt to run the actual course, based on their performance in the qualifying round.
I'm not at all far from the California Speedway (I've autocrossed there a few times), and I figured that this should be geek entertainment of the highest order. I was definitely not disappointed.
These robots are amazing. They are programmed with a set of GPS waypoints, then sent out on their own, with no outside input at all. They can only depend on their on-board sensors and computational resources.
 Just because they have the waypoints, doesn't mean they can blindly follow them. The qualifying course had all sorts of obstacles placed precisely at the programmed waypoints -- vehicles are expected to notice, identify, and avoid the obstacles. Some of the obstacles were small tank traps -- some were cars. Judging by the condition of the cars, not all of the robots successfully avoided them.
Just because they have the waypoints, doesn't mean they can blindly follow them. The qualifying course had all sorts of obstacles placed precisely at the programmed waypoints -- vehicles are expected to notice, identify, and avoid the obstacles. Some of the obstacles were small tank traps -- some were cars. Judging by the condition of the cars, not all of the robots successfully avoided them. This challenge is a great idea -- all sorts of teams showed up, with all sorts of vehicles. Blue Team (UC Berkeley students) fielded an autonomous motorcycle, and OshKosh/OSU fielded a gigantic truck. In between, there was a quad, a few custom vehicles, and a bunch of pickups and SUVs.
This challenge is a great idea -- all sorts of teams showed up, with all sorts of vehicles. Blue Team (UC Berkeley students) fielded an autonomous motorcycle, and OshKosh/OSU fielded a gigantic truck. In between, there was a quad, a few custom vehicles, and a bunch of pickups and SUVs. Team Bonzai fielded a Volkswagon Touareg that looked completely stock, save for a GPS antenna mounted to the roof, while the University of Indiana sent out a jeep whose front end was totally obscured by sensors. Red Team, from Carnegie-Mellon, sent out two Humvees, each with a gigantic, eye-like sensor mounted on top.
Team Bonzai fielded a Volkswagon Touareg that looked completely stock, save for a GPS antenna mounted to the roof, while the University of Indiana sent out a jeep whose front end was totally obscured by sensors. Red Team, from Carnegie-Mellon, sent out two Humvees, each with a gigantic, eye-like sensor mounted on top.
Strangely enough, despite a wide variety of approaches, almost all of the robots performed similarly. I watched robot after robot negotiate a difficult, obstacle-strewn course successfully. The Red Team and Stanford robots were particularly fast, but all sorts of robots managed to complete the course.
This is a significant improvement over last year, when it apparently took several days of trials before even one robot completed the course successfully. This time, a robot finished the course the first day.
And these guys weren't messing around -- these robots were moving out. DARPA had imposed various speed limits on sections of the course, presumably for safety, so that the 2-1/2 mile course could not be completed in less than 10 minutes. Several teams came in right at the optimal time, which would require some quick driving.
Think about how hard it would be for a robot to scan a hundred feet ahead, identify obstacles from the size of cones to the size of minivans, differentiate between pavement and grass, hay bales and cement barriers, make a plan to avoid the obstacles while keeping as close as possible to the preprogrammed waypoints, then direct the vehicle. At 30 mph, you're covering something like 40 feet a second, and most scanners don't look farther than 150 feet ahead. That's some quick computing!
I'm blown away at how good some of the robots are, but more than that, I'm blown away that so many different robots, with so many different configurations, manage to successfully traverse this qualifying course.
I don't think I'll be able to make it out to Primm, Nevada, for the actual contest, but I wonder if there won't be a winner this year. I sure hope so. This is almost as exciting as the Ansari X Prize last year!
posted by K at
2:23 PM
|
0 comments
![]()
